September 2024 Update
The Sept-embers1 of fire dance as the Climbuddy team delivers another update post!
We’ve used the information from the last post’s benchmarks to implement a better segmentation approach using a combination of YOLO detection and SAM segmentation. In addition, the mesh segmentation is now faster (long live parallelization) and much more accurate due to slight changes to the algorithm. 🎉
Let’s dive in!
App
Same as for the previous update – all focus is on the model generation pipeline. 🏜️
At the moment, a release date of 10. 2024 seems unlikely, but we’ll see what we can do.
Tech
Hold Detection
As discussed in the previous post, we’ve done many benchmarks and observations about the YOLO segmentation networks. These were useful, but experimenting with different datasets showed that the segmentation part of the network didn’t generalize well when evaluating images taken with different devices (e.g. phone vs. camera) and different sizes.
However, since the detection part seemed to work rather well, we experimented with using YOLO’s detection networks for obtaining bounding boxes and using SAM to generate the segmentation mask.
The results were pretty great!
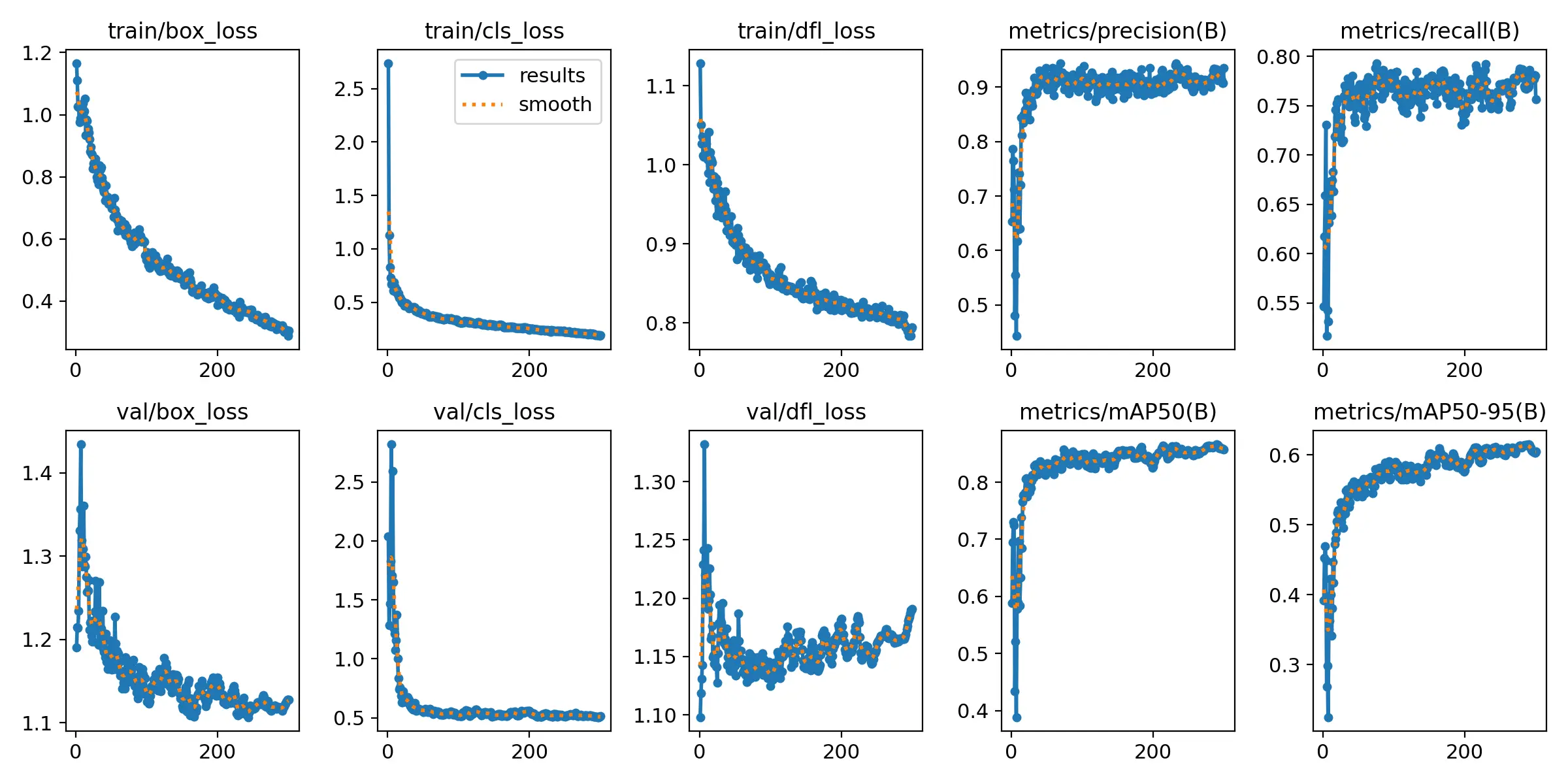








When training with images from the initial boulders and evaluating with images from reset boulders, we can see that the network seems to generalize very well, which is reflected in the inference results on the new boulders.
Equipped with these segmentations, we can now perform mesh segmentation.
Mesh Segmentation
We’ve refined the mesh segmentation algorithm in a number of ways, including:
- parallelization of the projection/raycasting sections
- better outlier filtering (when viewing a hold from a large distance)
- better thresholding approach (i.e. what triangles actually belong to a hold/volume)
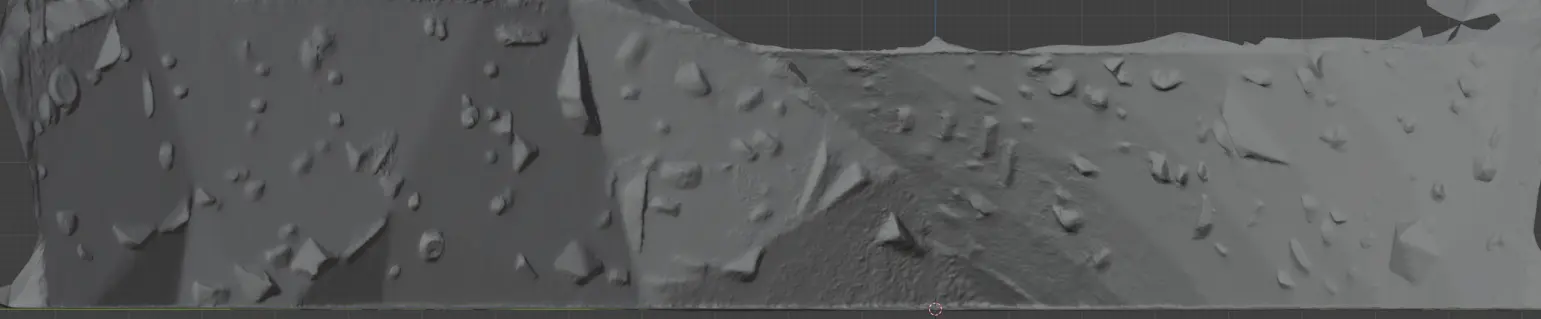

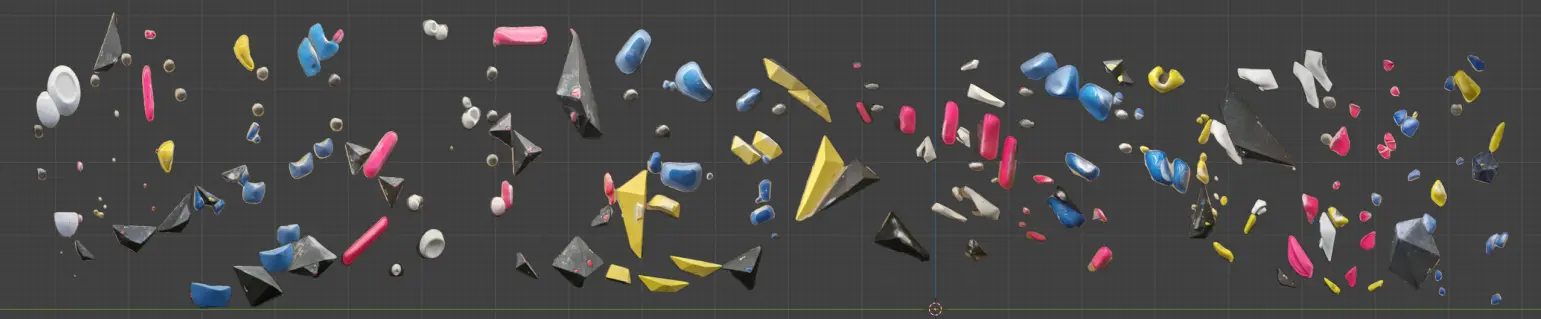
While the current results look good, there are many smaller heuristics that we would like to implement before v1.0 that address certain edge cases, as well as a more comprehensive hyperparameter optimization to make the results not just good, but great 🙂.
Rewrites
Programming is hard.
When implementing the versions of some of the classes facilitating the image segmentation, it was not easy to decide how to store things like detected objects. You do have formats like COCO (which we tried to use), but you’ll likely end up fighting them more than them actually being useful.
For that reason, we opted for possibly the worst idea – to store the segmentation masks as numpy arrays, with different values representing the segmentation objects. While we do use these full segmentation masks in the code, storing them like this runs into many issues:
Firstly, you will likely need to download more RAM:
import numpy as np
from sys import getsizeof
mask = np.zeros((1000, 2000, 3))
size = getsizeof(mask)
print(f"{size / 1024 ** 2:.2f} MB")
45.78 MB
This ties into the second issue – the segmentation masks are usually sparse, and (at least in our case, modulo some exceptions) the segmented objects have no holes, so we’re wasting a lot of memory. It’s generally a much better idea (and some formats do this, I wish I saw them first) to store meaning the polygons of the segmented objects.
And so…
24 files changed, 2033 insertions(+), 2677 deletions(-) 🙃
… every rewrite is a learning experience.
Team Climbuddy
-
I couldn’t think of a better pun, I’m sorry. ↩